2024年6月19日,由中国宇航学会等联合主办的大型国际赛事——月球基地2050国际创新大赛(Moon Station 2050 Global Innovation Competition)落下帷幕。suncitygroup太阳新城联合人工智能与自动化学院、建筑与城市规划学院组建的三支跨学科参赛队伍,分别斩获全球总决赛两项三等奖和一项优胜奖的好成绩。

月球是地球重要的伙伴,人类一直寻求重返月球并建设永久性的月球基地,为未来人类太空探索与星际移民提供跳板。月球基地建设是一项十分具有挑战性的任务,需要颠覆性的概念和技术。月球基地2050国际创新大赛以月球南极斯维尔德鲁普-汉森陨石坑为选址地,设置月球建筑、月球能源、月球机器人、月球交通与运输、宇航员生命与健康5个开放性赛道,要求参赛者挑战传统思维,提出未来月球基地建设和运维的创新概念和技术方案。
本次大赛面向国内外大学生和青年学者,吸引了国内外181支队伍参赛,其中有来自荷兰代尔夫特理工大学、瑞典皇家理工学院等全球二十多个国家的44个国际队伍,经过来自国际月球村协会、欧空局等全球宇航专家与研究机构的评估和答辩评审,遴选出全球总决赛获奖作品。按照赛事计划,大赛颁奖仪式将于世界月球日7月20日举办。
获奖团队介绍
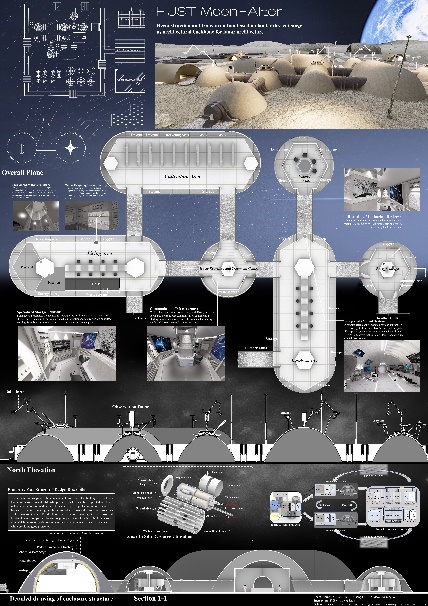
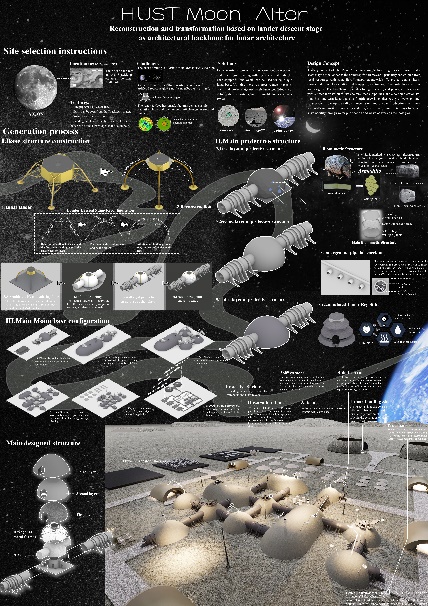
作品名称:HUST-Moon Altar
赛道分类:月球建筑
获奖等级:三等奖
团队成员:李雄彬、路畅(建筑与城市规划学院)、乔金、叶可鸣
作品介绍:HUST-Moon Altar的核心理念是以月球着陆器下降级作为建筑结构的支撑骨架,包括三种防护结构:仿生防护结构、烧结月壤砖防护结构和堆积月壤防护结构。布局分为资源区、生活区、科研区和种植区,旨在实现月球原位资源利用,实现绿色、可持续的月面驻留。
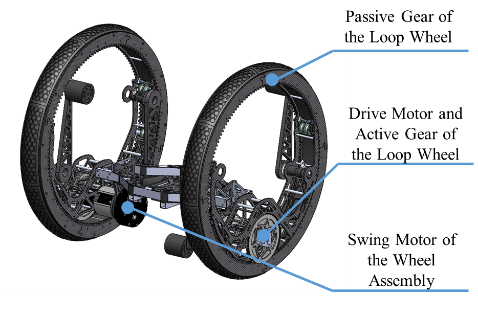
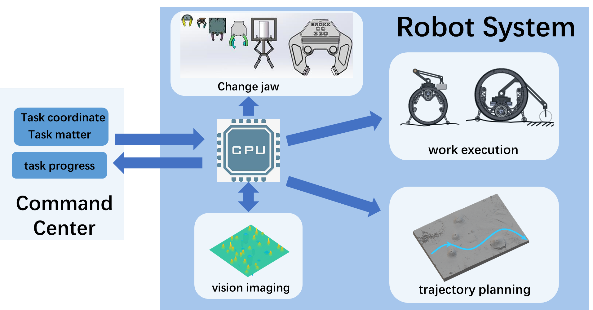
作品名称:AIA-CHE Leaper
赛道分类:月球机器人
获奖等级:三等奖
团队成员:李松昊(人工智能与自动化学院)、李浩然、底致远(人工智能与自动化学院)、尤轲
作品介绍:AIA-CHE Leaper设计了一种新型轮腿复合底盘智能自平衡跃迁机器人,可实现坐姿、站姿移动、翻滚、跳跃、变模、抗干扰等功能,并通过SolidWorks和CAXA CAD建模、SolidWorks仿真有限元分析和Matlab Simulink运动学仿真验证了其可行性,完成了总体设计。
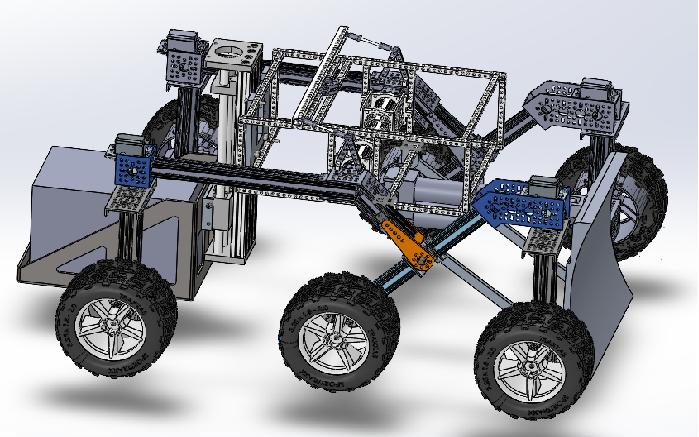
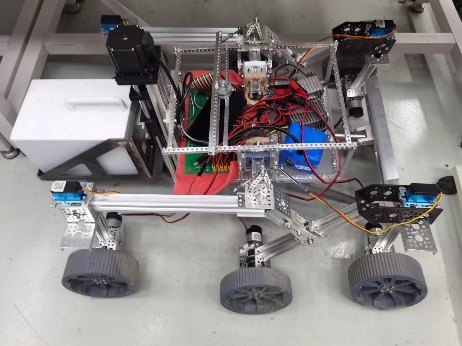
作品名称:HUST-LSO
赛道分类:月球机器人
获奖等级:优胜奖
团队成员:朱泽洋、王棋、尤轲、夏一峰
作品介绍:针对月表地形复杂和月球熔岩管道探测难点,设计了配备有月面地质雷达和推土铲刀的新型六轮月球漫游车HUST-LSO,旨在探索月球熔岩管道地质结构和分布,为月球熔岩管基地建造研究提供原位探测依据。
